

Robots
 |
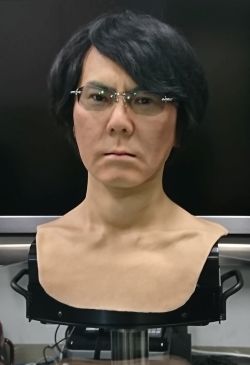
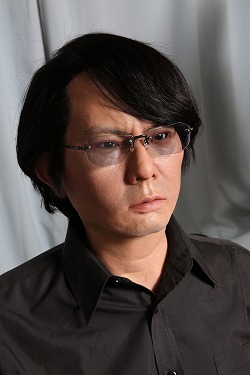
ジェミノイドHI-2ジェミノイドHI-2は石黒浩ATRフェロー/大阪大学教授に酷似した見かけをもった遠隔操作型アンドロイドです.全体で50個の自由度を持っており,人の様々な振る舞いを再現する事が出来ます.我々はこのアンドロイドを用いて,人の存在感とは一体何であるのか,また人の存在感は遠隔地へ伝達することができるか,といった疑問を実験を通じて明らかにします.スペック概要高さ: 140cm(椅子に座っている状態) 横幅: 100cm(床センサーパネル含む) センサー: 少数の触覚センサー アクチュエータ: 50の空気アクチュエータ 電源: 外部制御システム 空気アクチュエータを動かすためのエアフロー制御バルブ コンプレッサー 電気モータを動かすDC電源 コンピューティング: ロボット内部に処理システムはない ソフトウェア: 遠隔操作するためのシステム 自由度: 合計50 (頭部: 13, 胴体: 15, 手足の合計: 22) 構造と材料: 頭部:プラスチック 骨格:金属 形:ウレタン 皮膚:シリコン詳細ページ写真,動画 |
 |
テレノイドテレノイドは人間としての必要最低限の見かけと動きの要素だけからなる人間のミニマルデザインを持つ遠隔操作型アンドロイドです.そのデザインは一目で人とわかるものであると同時に,男性とも女性とも,あるいは幼い子とも高齢者とも見えるデザインとなっており,誰もが自らの存在感を遠隔地に伝えることができます.詳細ページ写真,動画 |
 |
エルフォイドエルフォイドはテレノイドのコンセプトを継承した携帯型遠隔操作アンドロイドです.人間のミニマルデザインと柔らかく肌触りのよい外装を携帯電話サイズのボディで実現しています.通常の携帯電話としての機能を有するため,誰もが何時でも何処でも簡単に,あたかも相手が目の前にいるかのように自然に相手と対話することができます.詳細ページ写真,動画 |
 |
ハグビーハグビーは遠隔地にいる相手の存在を強く感じながら対話することができる存在感伝達メディアです.テレノイド、エルフォイドの研究開発を通して、これらのロボットを抱きかかえたり、握ったりしながら対話することが、相手の存在感を強く感じる効果的な方法であることが分かってきました。「抱く」ことに注目して開発された「ハグビー」は単純な形でありながらもその抱き心地により相手の存在をより強く感じることのできる画期的な通信用メディアです。詳細ページ写真,動画特設ページ(京都西川) |
 |
ERICA(エリカ)ERICAは自律対話型アンドロイドの実現に向けた統合的な技術開発の研究プラットフォームとして開発された,対話に適した人間らしい見た目を持ったアンドロイドです.音声認識や動作生成などのさまざまな要素技術を組み合わせることにより,人間と自然な対話を行うための統合的な技術開発を行います.ERICAは,頭部,両腕,腰に44個の自由度を持ち,様々な表情を表出することが可能です.親しみやすい見かけとして,中性的な見かけをデザインしています.ERICAは音声合成により人らしい声で話すことができます.写真,動画 |
 |
Android I(アンドロイド アイ)Android Iは自律対話型ロボットの研究開発用のプラットフォームで,特に実証実験で使用することを想定して開発されており,可搬性が改善されています.自由度は頭部と腰のみに18自由度で,対話に必要な最低限の動きが表現できます. |
Robots (not in ATR)
 |
ジェミノイド HI-5ジェミノイドHI-5は石黒浩ATRフェロー/大阪大学教授の頭部に酷似した見かけをもった遠隔操作型アンドロイドです.全体で16個の自由度を持っており,表情やアイコンタクトなどの人の振る舞いを再現する事ができます.我々はこのアンドロイドを用いて,人の存在感とは一体何であるのか,また人の存在感は遠隔地へ伝達することができるか,といった疑問を実験を通じて明らかにします.スペック概要高さ: 50cm 横幅: 25cm アクチュエータ: 16の空気アクチュエータ 電源: 外部制御システム 空気アクチュエータを動かすためのエアフロー制御バルブを 動かすDC電源(50W) 空気アクチュエータを動かすためのコンプレッサー (100V,1000W) コンピューティング: ロボット内部に処理システムはない ソフトウェア: 遠隔操作するためのシステム 自由度: 合計16 構造と材料: 頭部:プラスチック 骨格:金属 皮膚:シリコン写真 |
 |
オトナロイドオトナロイドは成人女性の見かけを持ったジェミノイド(実在の人物に酷似したアンドロイド)です.全身に40個の自由度を持ち,様々なジェスチャや表情を表出することが可能です.人とアンドロイドのコミュニケーションの社会実験として,日本科学未来館において常設展示(2014年6月~)されています.日本科学未来館ではオトナロイドを遠隔操作して他人と対話する体験をすることができます.オトナロイドが自律的に振る舞う場合には,音声合成により人らしい声で話すことができます.写真 日本科学未来館のページ |
 |
コドモロイドコドモロイドは子供の見かけを持ったアンドロイドです.全身に30個の自由度を持ち,様々なジェスチャや表情を表出することが可能です.人とアンドロイドのコミュニケーションの社会実験として,日本科学未来館において常設展示(2014年6月~)されています.日本科学未来館ではコドモロイドはニュースキャスターとして自律的に振る舞い,日々科学ニュースなどを来館者にお届けしています.コドモロイドは,音声合成により人らしい声で話すことができます.写真 日本科学未来館のページ |
 |
ジェミノイドHI-4ジェミノイドHI-4は石黒浩ATRフェロー/大阪大学教授に酷似した見かけをもった遠隔操作型アンドロイドです.全体で16個の自由度を持っており,人の様々な振る舞いを再現する事が出来ます.我々はこのアンドロイドを用いて,人の存在感とは一体何であるのか,また人の存在感は遠隔地へ伝達することができるか,といった疑問を実験を通じて明らかにします.スペック概要高さ: 140cm(椅子に座っている状態),180cm(立っている状態) 横幅: 100cm(床センサーパネル含む) アクチュエータ: 16の空気アクチュエータ 電源: 外部制御システム 空気アクチュエータを動かすためのエアフロー制御バルブを 動かすDC電源(50W) 空気アクチュエータを動かすためのコンプレッサー (100V-240V,400W) コンピューティング: ロボット内部に処理システムはない ソフトウェア: 遠隔操作するためのシステム 自由度: 合計16 (頭部: 12, 胴体: 4) 構造と材料: 頭部:プラスチック 骨格:金属 形:ウレタン 皮膚:シリコン写真 |
 |
ジェミノイド FジェミノイドFは女性型の遠隔操作型アンドロイドです.ジェミノイドHI-2と同様モデルと酷似した見かけを持っていますが,自由度を12個に減らすことで,軽量化,安価化を実現しました.これにより,実験用プラットフォームとしてだけではなく,広く社会に普及していくことが期待されています.スペック概要高さ: 165cm (座高95cm) 横幅: 38cm センサ: 床センサは含まない アクチュエータ: 12の空気アクチュエータ 電源: ジェミノイドHI-2と同様 コンピューティング: ジェミノイドHI-2と同様 ソフトウェア: ジェミノイドHI-2と同様 自由度: 合計12(頭部: 11, 胴体: 1) 構造と材料: ジェミノイドHI-2と同様写真,動画 |
