
GEMINOID
| TOP | OVERVIEW | RESEARCH | PUBLICATIONS | RESOURCES |
RESOURCES
ジェミノイドに関する取材や資料をご希望の際は、ATR石黒浩特別研究所 ( hil-contact@atr.jp ) までご連絡ください。
下記資料の著作権は、ATR石黒浩特別研究所に属します。
ジェミノイドの概要
- Ishiguro, H., Geminoid - Teleoperated Android of an Existent Person -
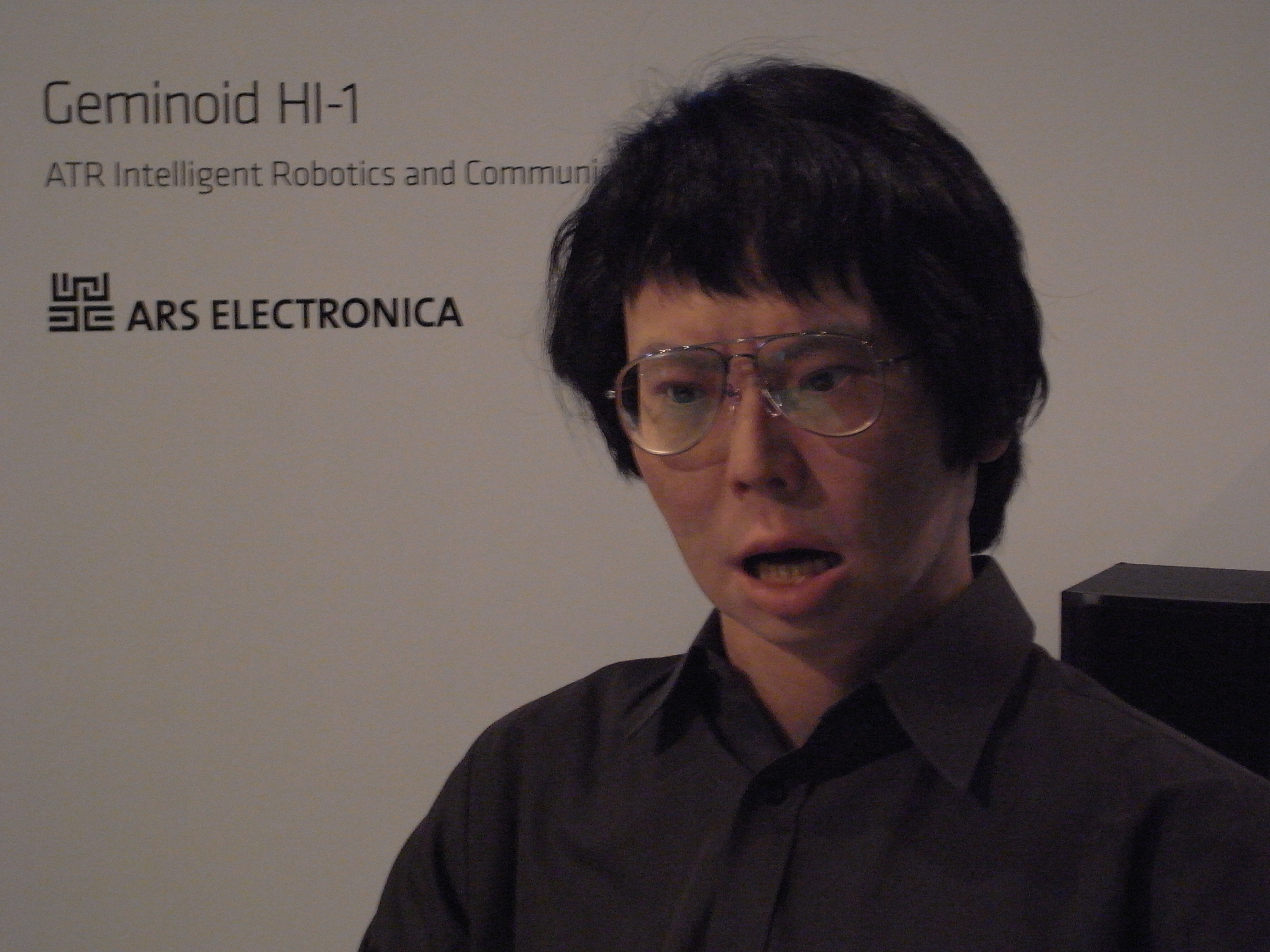
- Geminoid HI-1 research topics panel
- (English-only version)
ジェミノイドHI-2のスペック概要
- 高さ: 140cm(椅子に座っている状態)
- 横幅: 100cm(床センサーパネル含む)
- センサー: 少数の触覚センサー
- アクチュエータ: 50の空気アクチュエータ
- 電源: 外部制御システム(空気アクチュエータを動かすためのエアフロー制御バルブ、コンプレッサー、電気モータを動かすDC電源)
- コンピューティング: ロボット内部に処理システムはない
- ソフトウェア: 遠隔操作するためのシステム
- 自由度: 合計50(頭部: 13, 胴体: 15, 手足の合計: 22)
- 構造と材料: 頭部:プラスチック、 骨格:金属、形:ウレタン、皮膚:シリコン
写真


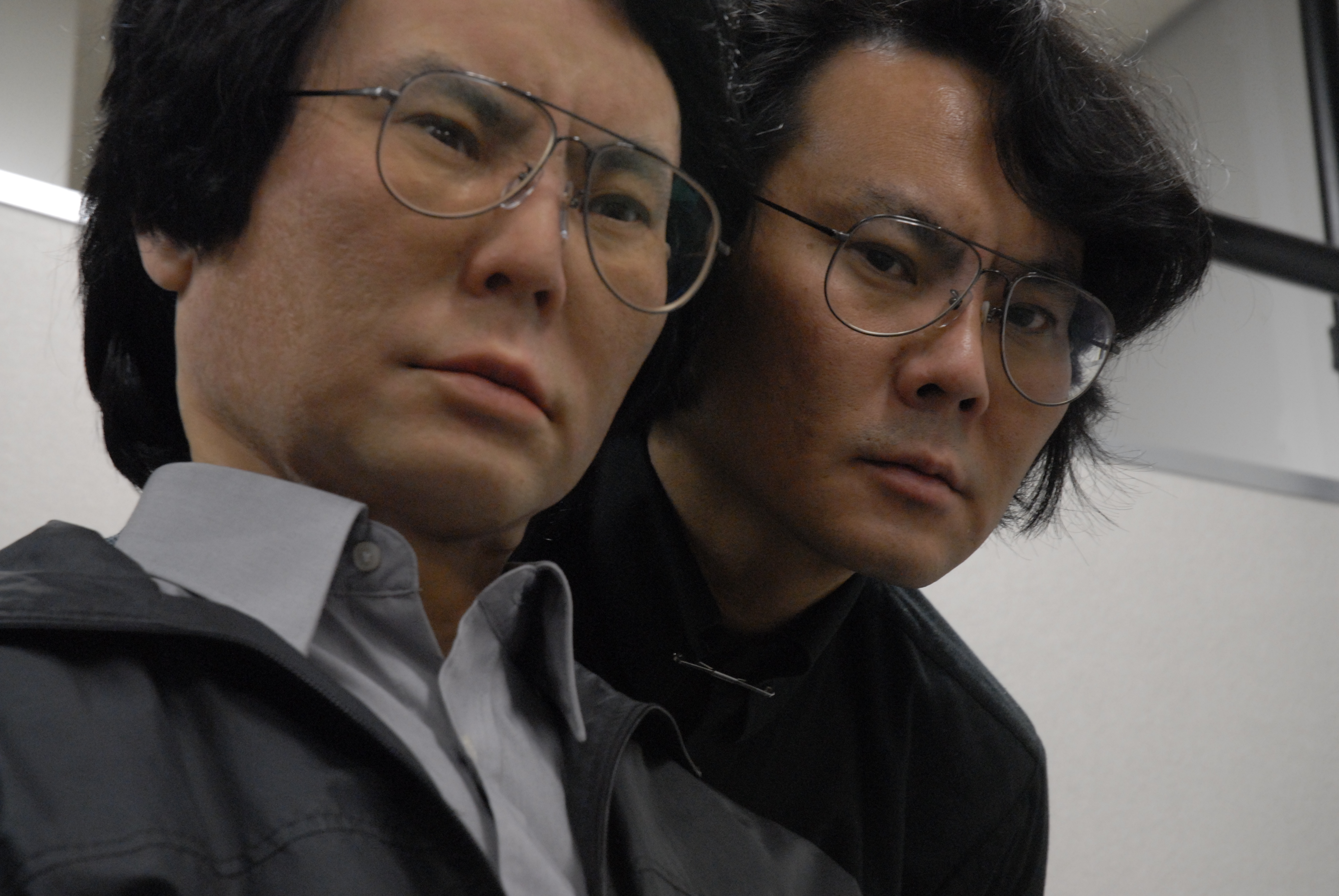
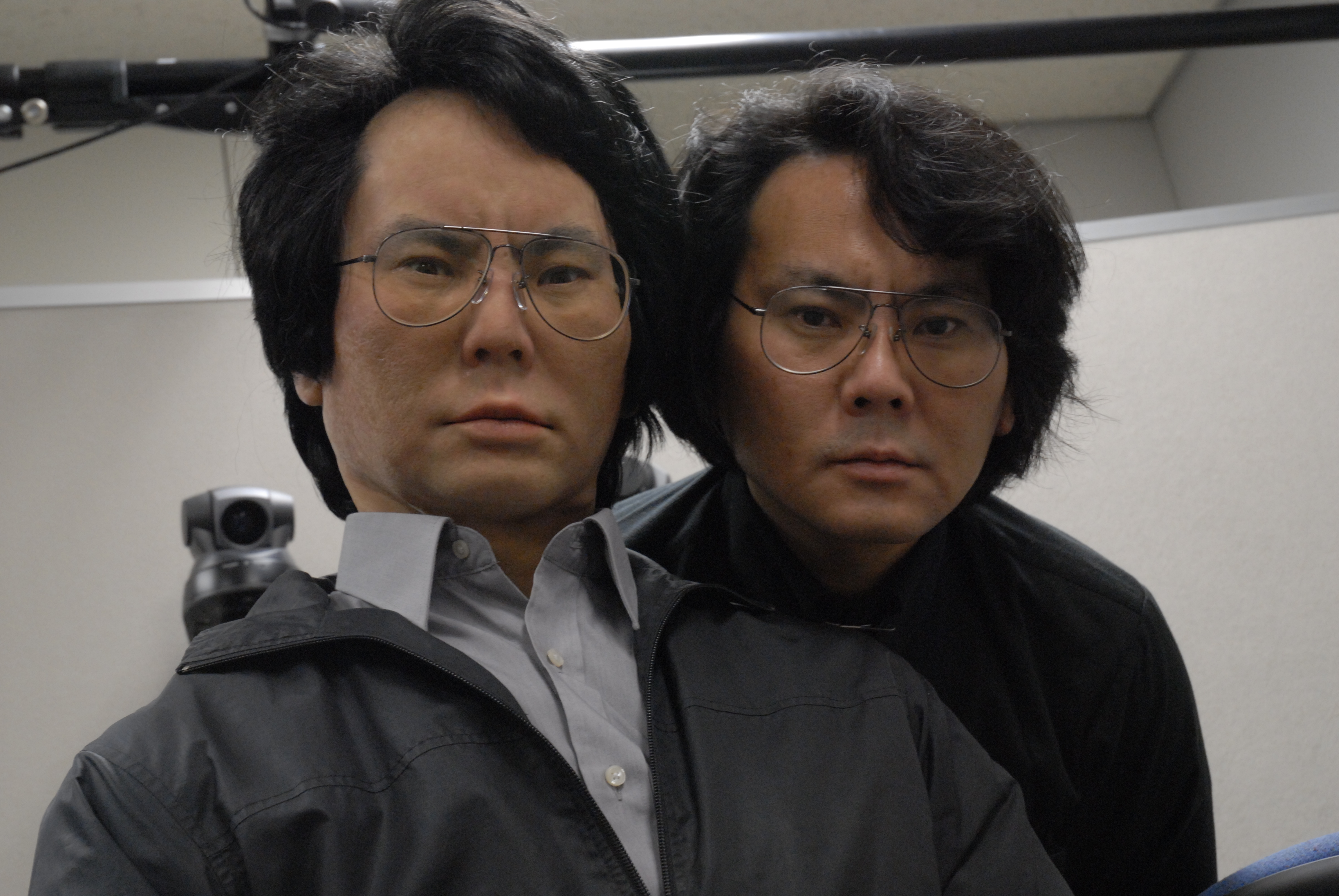
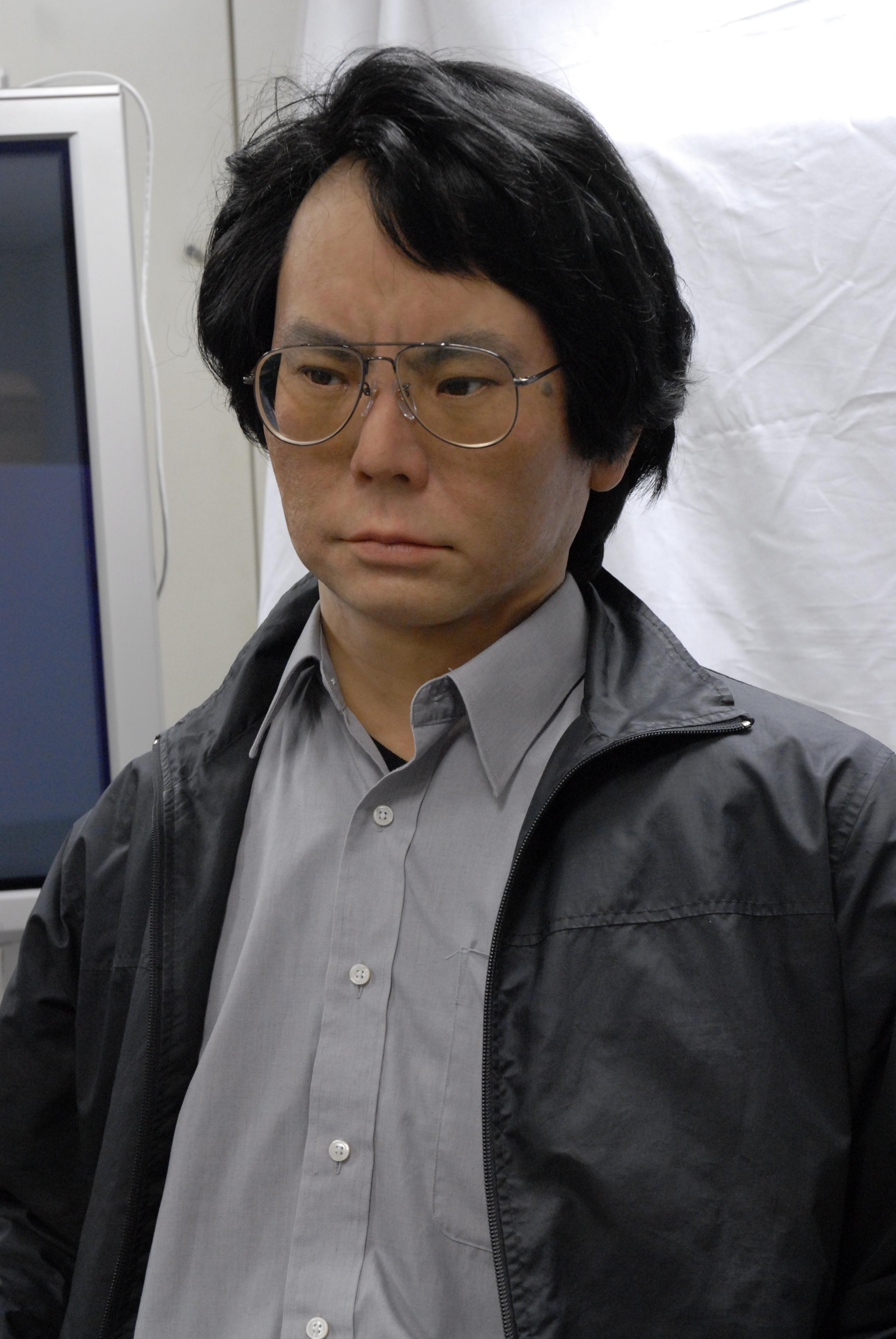
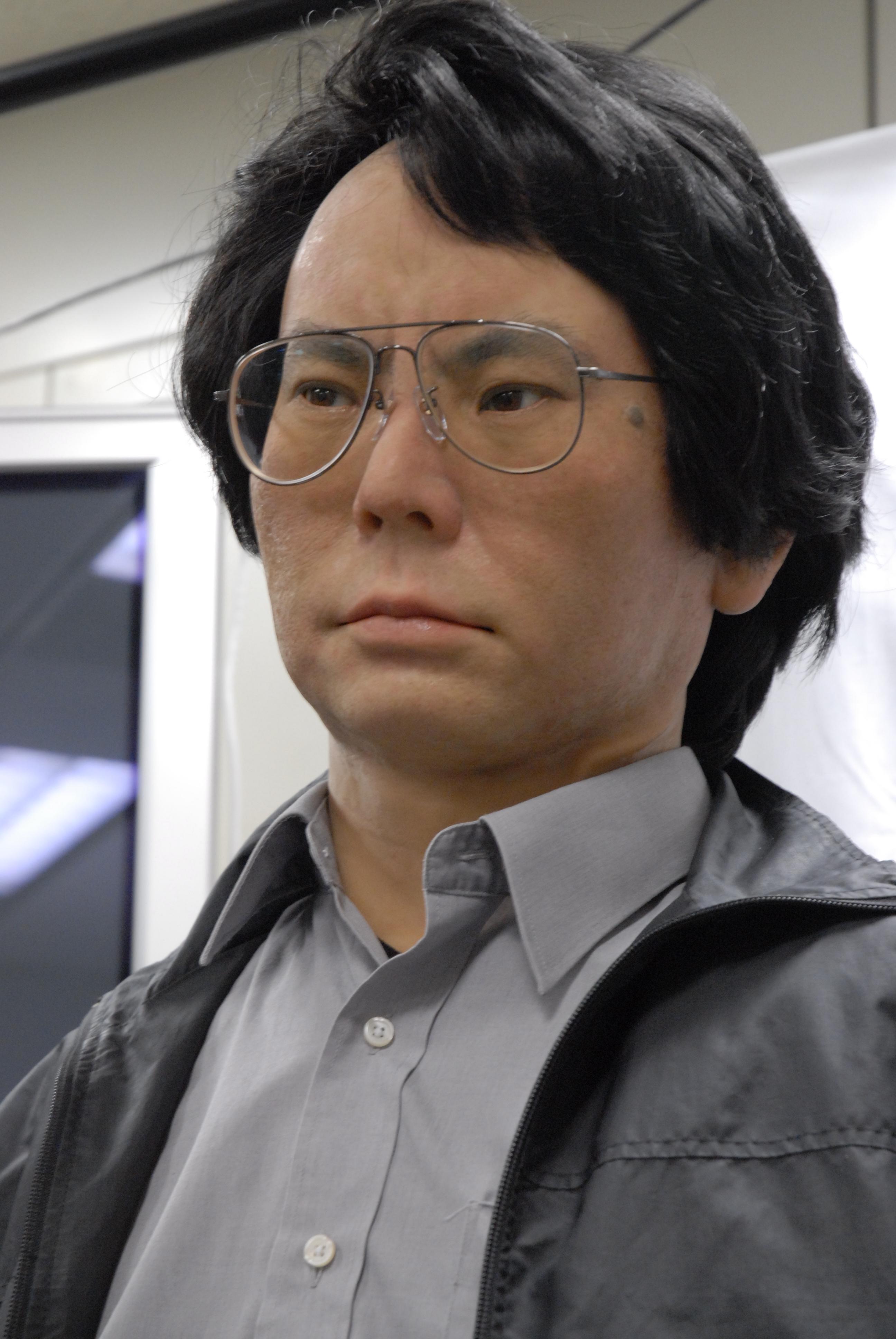
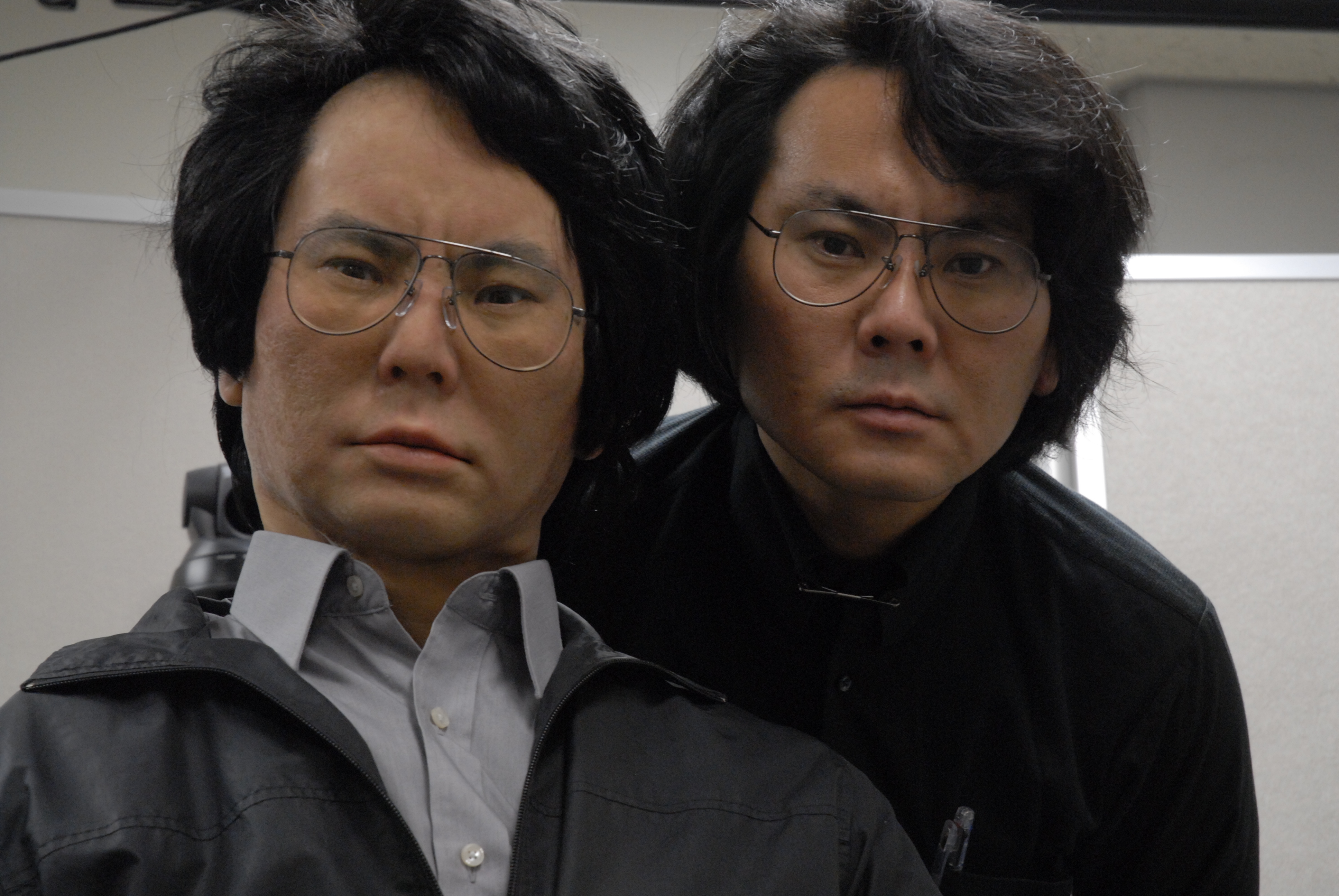


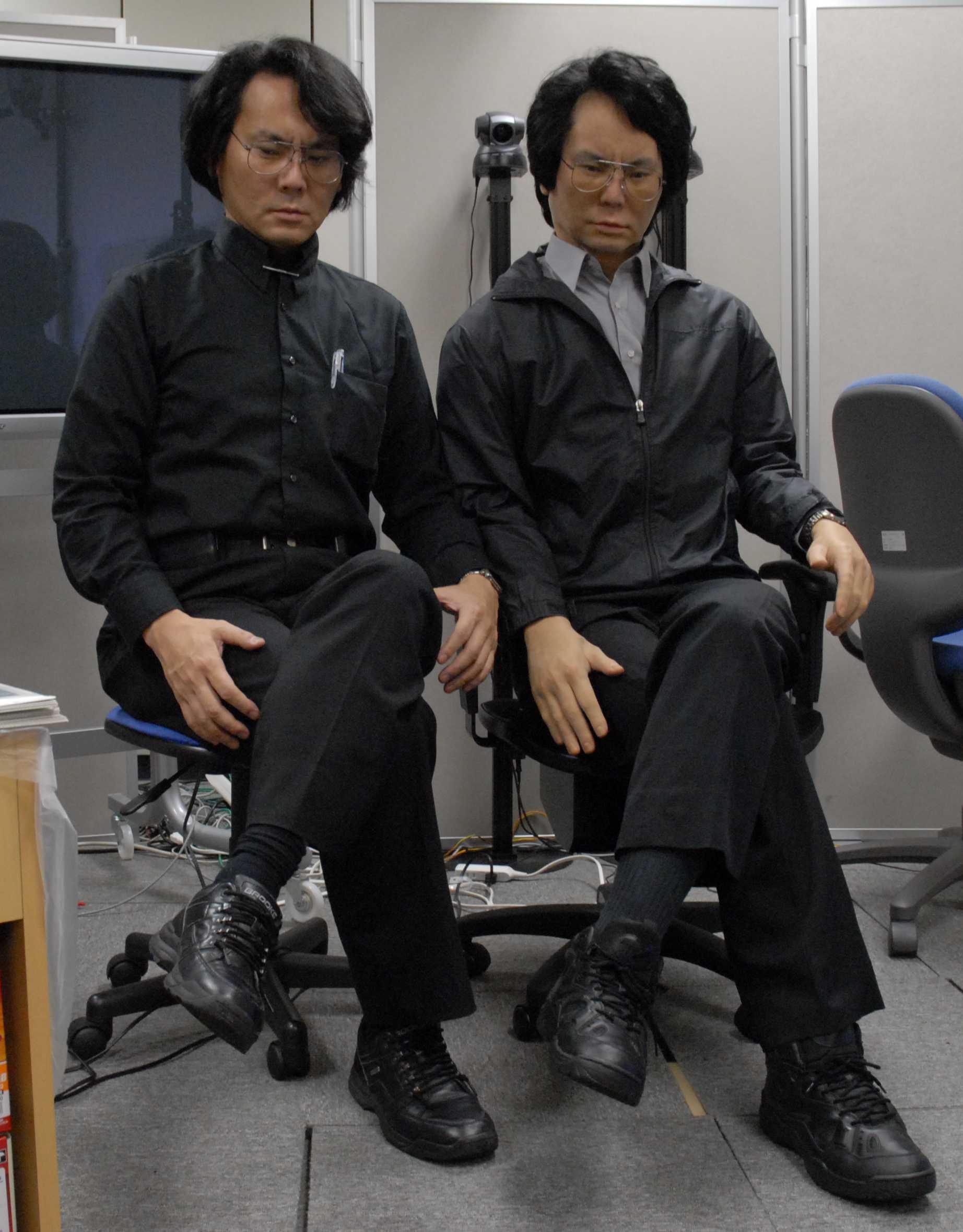








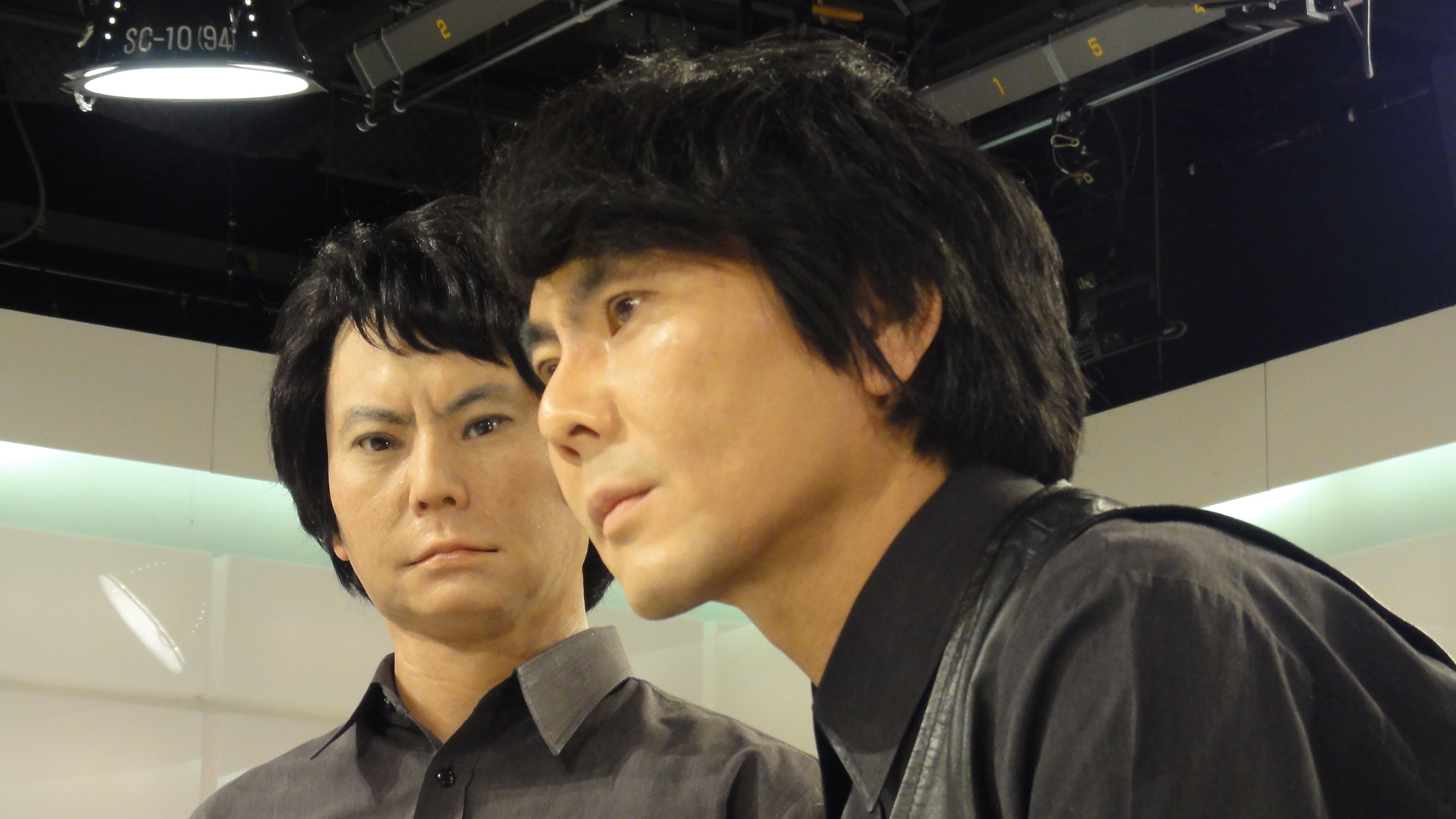






(Photo by Makoto Ishida)


映像
 Greetings (in sync) |
Greetings (in sync; with subtitles) |
 interview |
 interview (Geminoid only) |
 interview (in Japanese) |
 interview (in Japanese; Geminoid only) |
 don't touch! |
 don't touch!(Geminoid only) |
本研究の一部は科研費基盤研究(S)(25220004および20220002)の助成を受けたものである
「ジェミノイド」は(株)国際電気通信基礎技術研究所の登録商標です
Copyright (C) ATR Hiroshi Ishiguro Laboratories
Contact: hil-contact@atr.jp
「ジェミノイド」は(株)国際電気通信基礎技術研究所の登録商標です
Copyright (C) ATR Hiroshi Ishiguro Laboratories
Contact: hil-contact@atr.jp