
TELENOID
大阪大学とATRは、人の存在感を効果的に伝えうるデザインを採用した小型の遠隔操作型アンドロイド「テレノイド™R1」を開発しました。
これまでに開発された人の存在感を伝える遠隔操作アンドロイドである、ジェミノイド™HI-1(ATR開発)やジェミノイド™F(大阪大学とATRとの共同開発)は、
外観を実在する人間の姿形に極めて近づけ、特定の個人の存在感を伝えようとするものでした。これに対して、今回開発したテレノイド™R1は、
人間としての必要最小限の見かけと動きの要素のみを備えるものとなっています。
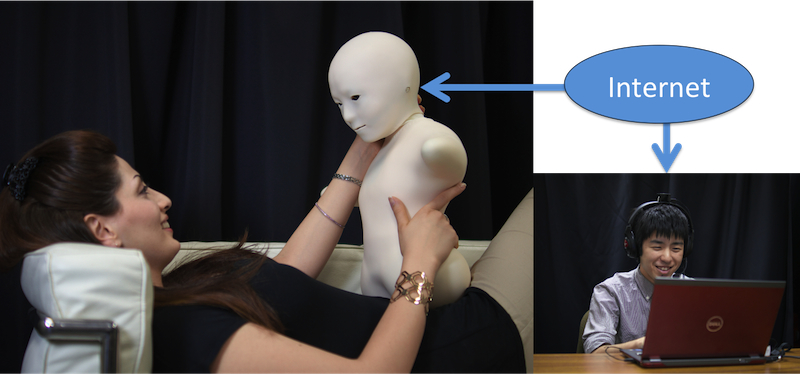
このテレノイド™のデザインは、一目で人とわかるものであると同時に、男性とも女性とも、あるいは幼い子とも高齢者とも見えるデザインとなっており、
あたかも遠隔地で操作している知人が側にいるような存在感を実現します。
さらに、柔らかく、肌触りの良い外装と、子供のような小型のボディの採用により、容易に抱えることができます。
つまり、誰でも乗り移れ、スキンシップも図れるものとなっています。
テレノイド™(Telenoid™)は、Telephone(電話)やTele-operation(遠隔操作)のTeleに、Humanoid(人間型ロボット)のnoid(〜のような)を組み合わせて命名しています。 このテレノイド™は、研究面では、人らしい存在感を遠隔地に伝えるために必要な要素を探る研究において利用していきます。
テレノイド™ R1の主な特徴は以下の通りです。
- 人の存在感を効果的に伝える見かけと動きを備えたデザインを実現
- 柔らかく、安心感を与える外装を採用
- アクチュエータ数を削減し、コストダウンを実現
(Telenoid™ R1:9、Geminoid™ HI-1:50、Geminoid™ F:12) - 電気モーターの採用により、システムの大幅な小型化と配線の簡単化を実現
- ATRで培われた遠隔操作システム技術に基づき、誰もが容易に遠隔操作できるシステムを実現
| Telenoid™ R1 | Telenoid™ R2 | Telenoid™ R2w | Telenoid™ R2l | Telenoid™ R3 | Telenoid™ R3b | Telenoid™ R4 | |
|---|---|---|---|---|---|---|---|
| 開発時期 | 2010年8月 | 2011年3月 | 2012年1月 | 2012年3月 | 2012年11月 | 2013年6月 | 2013年7月 |
| 高さ | 約80cm | 約70cm | 約50cm | ||||
| 重さ | 約5kg | 約3kg | 約4kg | 約2kg | 約3kg | 約3.5kg | 約3.5kg |
| センサ | なし | カメラ:1,マイク:2,姿勢センサ:1(3軸加速度センサ&2軸ジャイロ) | なし | マイク:2 | |||
| アクチュエータ | サーボモータ | ||||||
| 動力源 | 外部DC電源 | バッテリ | 外部DC電源 | バッテリ | |||
| CPU | モータ制御用マイコン(ARM7 60Hz)を内蔵,別途外部に制御用PCが必要 | モータ制御用マイコン(Arduino)を内蔵,別途外部に制御用PCが必要 | 組み込みPC(beaglebone)を内蔵 | ||||
| 自由度 | 眼球:3,口:1,首:3,両腕:2 | 口:1,首:2,両腕:2 | 眼球:3,口:1,首:3,両腕:2 | ||||
| 外装素材 | シリコン | 塩化ビニル | |||||
| 改良点 | センサの追加,外装素材の変更 | 制御PCとの接続を無線化 | 軽量化 | 軽量化,制御PCとの接続を無線化 | PC搭載 | デザイン変更 | |
Telenoid R4

テレノイドR4はこれまでの実証実験の結果に基づき、使いやすさを向上した第4世代のテレノイドです。
これまでショッピングモールや高齢者施設、小学校へテレノイドを持込み一般の人々に実際に使ってもらう中で、膝の上に置きにくい、首の動きが小さい、重い、操作システムがわかりにくいといった意見を頂きました。これらを基にテレノイドR4では膝の上に置きやすいようなデザイン、首周りにより柔らかな素材の使用、部品点数の再確認、より洗練された操作システムにより、使いやすさを大きく向上させました。
(注)テレノイド™の開発は、科学研究費補助金 基盤研究(S)「遠隔操作アンドロイドによる存在感の研究」<研究代表者 石黒 浩(大阪大学教授・ATRフェロー)> および JST 戦略的創造推進事業(CREST)「共生社会に向けた人間調和型情報技術の構築」採択課題「人の存在を伝達する携帯型遠隔操作アンドロイドの研究開発」<研究代表者 石黒浩 ATRフェロー(大阪大学教授)>の一環として行われたものです。